UITP’s SPACE project on automated vehicles reaches new milestone
Integrating automated vehicles (AVs) into the public transport network
UITP is thrilled to announce that it has reached a major milestone in its SPACE (Shared Personalised Automated Connected vEhicles) project. Launched in 2018 with the aim of placing public transport at the centre of the automated vehicles (AVs) revolution, SPACE counts over 50 partners from over 20 countries, all members of UITP.
One of the main objectives of SPACE is to provide members with the right tools and knowledge on how to integrate AVs into the public transport network. Now, the project partners have joined forces and have developed a high-level reference architecture that aims at ensuring a seamless integration of driverless vehicles with other IT systems in the mobility ecosystem.
The main goal of this reference architecture is to help operators and cities make the right technical decisions when integrating AVs into the public transport network, this way speeding up the deployment of driverless mobility services.
The new architecture is the result of bringing around the table a wide range of stakeholders from different parts of the sector, collaborating towards a result that will benefit all.
To find out more, we spoke to some of the partners involved in developing the architecture, all from a different area of expertise. While Transdev provided its extensive experience as PTO, Bestmile tells us a bit more about the process of developing the architecture, and we spoke to ITxPT about interoperability and how the model can be used for other scenarios.
Luc Texier, Head of Sales (Europe), Bestmile
Can you explain why the reference architecture is important for the sector?
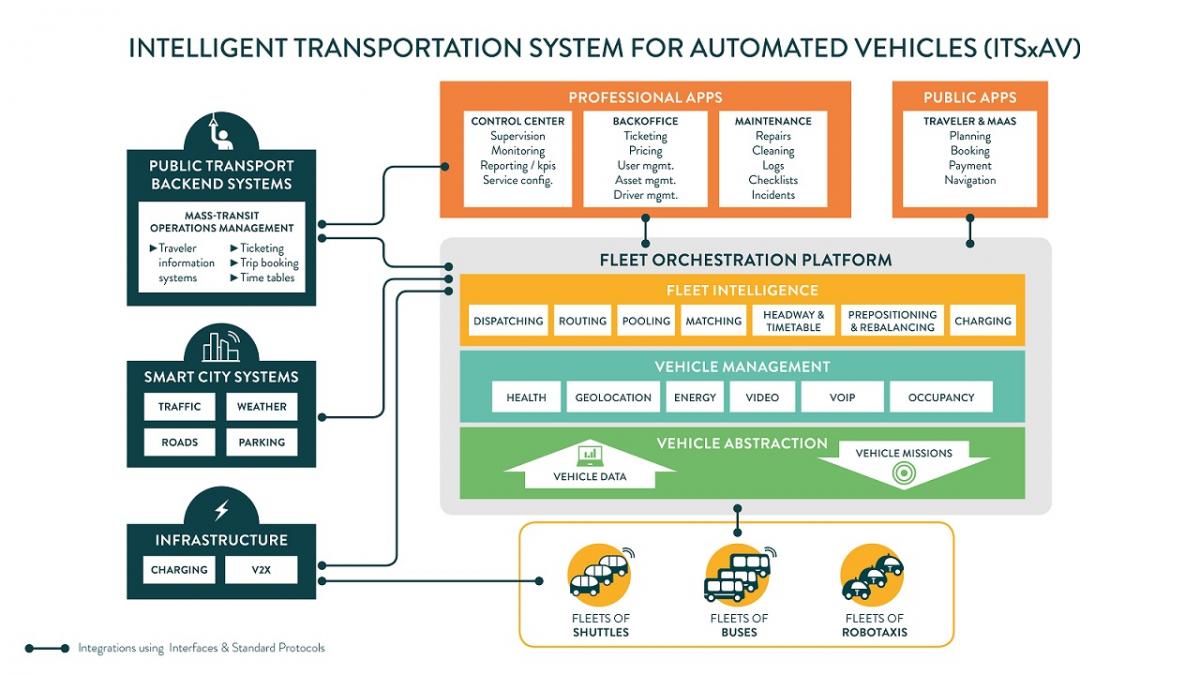
The Intelligent Transportation System for Autonomous Vehicles (ITSxAV) reference architecture is a must-have for any PTO or authority in the process of developing autonomous mobility solutions.
I remember the first face2face meeting in Brussels when we kicked off the SPACE project: everybody agreed that UITP had to take the lead to help the industry find its way through a number of new technologies and providers, for many, less than few years old! Automated shuttles hit the market only 5+ years ago and driverless people mobility is still a challenge today to grasp for an industry used to the usual combo vehicles+drivers+infrastructure.
It became very clear that the outcome of the dedicated working group would be to provide PTOs and PTAs with a compass for them to use to make the right decisions from the start and find the leading providers.
The reference architecture is important also because it takes into account all the necessary pieces of a real-life mobility service. We included the surrounding public transport systems of course but also the smart city infrastructures and the many integration points in between. Hopefully this architecture will also guide the industry towards more standardisation and more openness to provide PTOs with enough software, hardware and integration options.
It became very clear that the outcome of the dedicated working group would be to provide PTOs and PTAs with a compass.

Can you tell us a bit more how the reference architecture was developed within SPACE?
Thanks to the international footprint and leadership of UITP, we were able to gather in the working group the best subject-matter experts in the public transportation industry with individuals from Hochbahn, INIT, IVU, Keolis, LTA, PTV Group, Trapeze, Transdev, Ruter, VDV and more. Also, the new comers from the autonomous mobility sector such as Navya, Easymile or Local Motors shared their experience from the vehicle perspective.
Bestmile brought its forward-looking approach on the challenge of orchestrating fleets of automated vehicles of different kind and origin from a software platform standpoint.
The group decided to make our proposal as straightforward as possible with an architecture diagram that had to fit on one slide. We wanted to mimic the success of the 2017 UITP Policy Brief “Autonomous vehicles: a potential game changer for urban mobility” and its main diagram which has been used all around the word in so many conferences.
Mid 2019 we refined the draft of the ITSxAV, refactored quite a bit along the way, then added a glossary to describe briefly the purpose of the main components.
Patricia Villoslada, Executive Vice President, Transdev Autonomous Transport Systems
Can you explain how the reference architecture can support PTOs such as Transdev in integrating AVs into public transport?
As an operator and global integrator of mobility, Transdev provides 11 million passenger trips every day across 14 transport modes in 17 different countries. Even though AVs are a disruptive technology in themselves, it is important to prepare their integration into our public transport networks. The strength of this reference architecture is its ability to aggregate the whole autonomous mobility ecosystem with the shared objective of facilitating the arrival of AVs. Moreover, this common worldwide approach is fully suited to the public transport sector and enables the operation of mixed fleets of vehicles (automated and manually).
![]()
© STEPHANIE JAYET/CAPA Pictures
Transdev is involved in many AV pilots. What are some of the challenges you are facing whereby the architecture could be of help?
Transdev is a leader in operating shared autonomous mobility services with 3.5 million passengers transported. Each demo site has its own unique features but having a common reference architecture will facilitate connections between all the various tools and applications used to manage the service. Thus, it will speed up the deployment at a larger scale while keeping the cost of operations under control.
Public transportation has an important role to play in terms of connecting people, enabling social inclusion, and protecting the environment.

How do you see the role of public transport in the automated mobility revolution?
Public transportation has an important role to play in terms of connecting people, enabling social inclusion, and protecting the environment. It is key for public transport authorities to enhance their vision of shared mobility with the advantages of AVs. That is why we are collaborating with the UITP SPACe initiative, to support autonomous technology’s development with the goal of serving citizens and communities.
Emmanuel de Verdalle, Technical Committee Chair, ITxPT
Can you tell us a bit more about ITxPT’s involvement in the Reference Architecture?
One key challenge for the Reference Architecture is to secure interoperability. This means to define an architecture which includes any type of systems and any type of transport modes (AV and conventional) though standard and modular interfaces. Thanks to its ecosystem of public transport stakeholders, and strong link with European Standardisation bodies, ITxPT has supported the definition of the architecture.
With the introduction of new modes of transport like AVs, this interoperability challenge is even more strategic as it introduces newcomers in the ecosystem.

Can you explain why interoperability and standardisation is so important for the integration of AVs?
Interoperability is key in public transport operations which involves multi-operators of vehicle fleets, multi-suppliers of IT systems and multi-providers of vehicles. With the introduction of new modes of transport like AVs, this interoperability challenge is even more strategic as it introduces newcomers in the ecosystem. Consequently, standardisation of interfaces is a must to secure an efficient and sustainable architecture.
You can find the ITSxAV – Reference Architecture here.
Related Resources
 publication
publication Advancing Digital Transformation in Public Transport with a Digital Mindset
 publication
publication AI in Public Transport
 publication
publication Data4PT Project Brief
 news
news Unlocking the power of data for sustainable mobility: DATA4PT project concludes
 news
news The digital revolution gets smarter: IT-TRANS 2024 concludes with a focus on the future
 news
news How technology can improve passenger flow and crowd management
 publication
publication Investing in Technologies for Passenger Flow and Crowd Management
 publication
publication Large Scale Bus Electrification: IT Systems Checklist
become a member